Data communication
- Components:
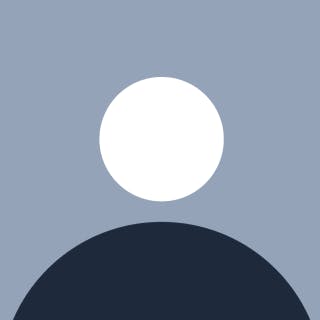
→ A data communications system has five components.
•Message. The message is the information (data) to be communicated. Popular forms of information include text, numbers, pictures, audio, and video.
•Sender. The sender is the device that sends the data message. It can be a computer, workstation, telephone handset, video camera, and so on.
•Receiver. The receiver is the device that receives the message. It can be a computer, workstation, telephone handset, television, and so on.
•Transmission medium. The transmission medium is the physical path by which a message travels from sender to receiver. Some examples of transmission media include twisted-pair wire, coaxial cable, fiber-optic cable, and radio waves
•Protocol. A protocol is a set of rules that govern data communications. It represents an agreement between the communicating devices. Without a protocol, two devices may be connected but not communicating, just as a person speaking French cannot be understood by a person who speaks only Japanese.
Information today comes in different forms such as text, numbers, images, audio, and video.
Text:
In data communications, text is represented as a bit pattern, a sequence of bits (Os or Is). Different sets of bit patterns have been designed to represent text symbols. Each set is called a code, and the process of representing symbols is called coding. Today, the prevalent coding system is called Unicode, which uses 32 bits to represent a symbol or character used in any language in the world. The American Standard Code for Information Interchange (ASCII), developed some decades ago in the United States, now constitutes the first 127 characters in Unicode and is also referred to as Basic Latin.
Numbers:
Numbers are also represented by bit patterns. However, a code such as ASCII is not used to represent numbers; the number is directly converted to a binary number to simplify mathematical operations.
Images:
• Images are also represented by bit patterns. In its simplest form, an image is composed of a matrix of pixels (picture elements), where each pixel is a small dot. The size of the pixel depends on the resolution.
• For example, an image can be divided into 1000 pixels or 10,000 pixels. In the second case, there is a better representation of the image (better resolution), but more memory is needed to store the image.
• After an image is divided into pixels, each pixel is assigned a bit pattern. The size and the value of the pattern depend on the image.
• For an image made of only B & W (e.g., a chessboard), a I-bit pattern is enough to represent a pixel.
• you can increase the size of the bit pattern to include gray scale. For example, to show four levels of gray scale, you can use 2-bit patterns. A black pixel can be represented by 00, a dark gray pixel by 01, a light gray pixel by 10, and a white pixel by 11.
There are several methods to represent color images. One method is called RGB, so called because each color is made of a combination of three primary colors: red, green, and blue. The intensity of each color is measured, and a bit pattern is assigned to it. Another method is called YCM, in which a color is made of a combination of three other primary colors: yellow, cyan, and magenta.
Audio: Audio refers to the recording or broadcasting of sound or music. Audio is by nature different from text, numbers, or images. It is continuous, not discrete.
Video:
Video refers to the recording or broadcasting of a picture or movie. Video can either be produced as a continuous entity (e.g., by a TV camera), or it can be a combination of images, each a discrete entity, arranged to convey the idea of motion. Again we can change video to a digital or an analog signal.
Data Flow
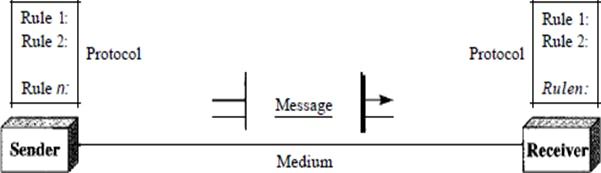
Simplex:
In simplex mode, the communication is unidirectional, as on a one-way street. Only one of the two devices on a link can transmit; the other can only receive (see Figure a). Keyboards and traditional monitors are examples of simplex devices. The keyboard can only introduce input; the monitor can only accept output. The simplex mode can use the entire capacity of the channel to send data in one direction.
Half-Duplex:
In half-duplex mode, each station can both transmit and receive, but not at the same time. When one device is sending, the other can only receive, and vice versa The half-duplex mode is like a one-lane road with traffic allowed in both directions.
When cars are traveling in one direction, cars going the other way must wait. In a half-duplex transmission, the entire capacity of a channel is taken over by whichever of the two devices is transmitting at the time. Walkie-talkies and CB (citizens band) radios are both half-duplex systems.
The half-duplex mode is used in cases where there is no need for communication in both directions at the same time; the entire capacity of the channel can be utilized for each direction.
Full-Duplex:
In full-duplex both stations can transmit and receive simultaneously (see Figure c). The full-duplex mode is like a two-way street with traffic flowing in both directions at the same time. In full-duplex mode, signals going in one direction share the capacity of the link: with signals going in the other direction. This sharing can occur in two ways: Either the link must contain two physically separate t:nmsmisson paths, one for sending and the other for receiving; or the capacity of the channel is divided between signals traveling in both directions. One common example of full-duplex communication is the telephone network. When two people are communicating by a telephone line, both can talk and listen at the same time. The full-duplex mode is used when communication in both directions is required all the time. The capacity of the channel, however, must be divided between the two directions.
NETWORKS
A network is a set of devices (often referred to as nodes) connected by communication links. A node can be a computer, printer, or any other device capable of sending and/or receiving data generated by other nodes on the network.
Distributed Processing
Most networks use distributed processing, in which a task is divided among multiple computers. Instead of one single large machine being responsible for all aspects of a process, separate computers (usually a personal computer or workstation) handle a subset.
Network Criteria
A network must be able to meet a certain number of criteria. The most important of these are performance, reliability, and security.
Performance:
Performance can be measured in many ways, including transit time and response time.
Transit time is the amount of time required for a message to travel from one device to another.
Response time is the elapsed time between an inquiry and a response. The performance of a network depends on a number of factors, including the number of users, the type of transmission medium, the capabilities of the connected hardware, and the efficiency of the software.
Performance is often evaluated by two networking metrics: throughput and delay. We often need more throughput and less delay. However, these two criteria are often contradictory. If we try to send more data to the network, we may increase throughput but we increase the delay because of traffic congestion in the network.
Reliability:
In addition to accuracy of delivery, network reliability is measured by the frequency of failure, the time it takes a link to recover from a failure, and the network’s robustness in a catastrophe.
Security:
Network security issues include protecting data from unauthorized access, protecting data from damage and development, and implementing policies and procedures for recovery from breaches and data losses.
Physical Structures
Type of Connection
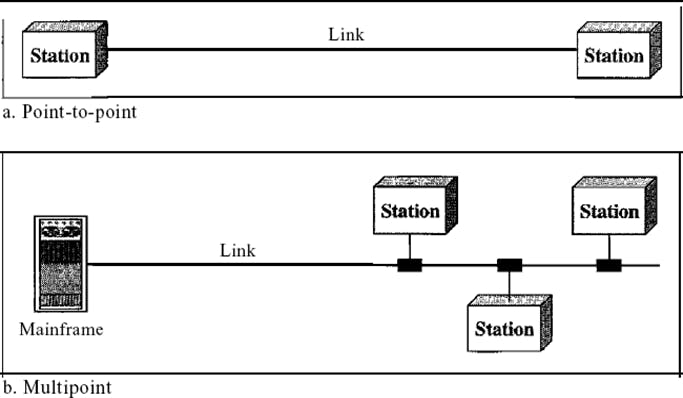
A network is two or more devices connected through links. A link is a communications pathway that transfers data from one device to another. There are two possible types of connections: point-to-point and multipoint.
Point-to-Point
A point-to-point connection provides a dedicated link between two devices. The entire capacity of the link is reserved for transmission between those two devices. When you change television channels by infrared remote control, you are establishing a point-to-point connection between the remote control and the television’s control system.
Multipoint
A multipoint (also called multidrop) connection is one in which more than two specific devices share a single link. In a multipoint environment, the capacity of the channel is shared, either spatiallyor temporally. If several devices can use the link simultaneously, it is a spatially shared connection. If users must take turns, it is a timeshared connection.
Physical Topology
The term physical topology refers to the way in which a network is laid out physically. One or more devices connect to a link; two or more links form a topology. The topology of a network is the geometric representation of the relationship of all the links and linking devices (usually called nodes) to one another. There are four basic topologies possible: mesh, star, bus, and ring.
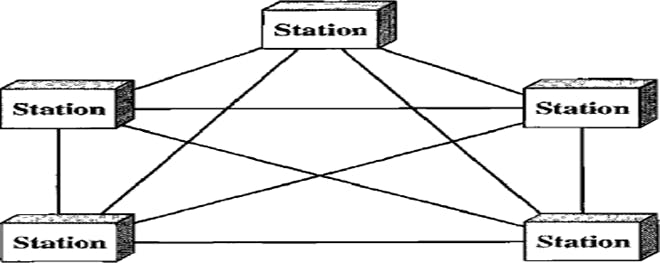
Mesh: In a mesh topology, every device has a dedicated point-to-point link to every other device. The term dedicated means that the link carries traffic only between the two devices it connects.
To find the number of physical links in a fully connected mesh network with n nodes, we first consider that each node must be connected to every other node. Node 1 must be connected to n — I nodes, node 2 must be connected to n — 1 nodes, and finally node n must be connected to n — 1 nodes. We need n(n — 1) physical links. However, if each physical link allows communication in both directions (duplex mode), we can divide the number of links by 2. In other words, we can say that in a mesh topology, we need n(n -1) /2 duplex-mode links.
To accommodate that many links, every device on the network must have n — 1 input/output ports to be connected to the other n — 1 stations
Advantages:
1.No traffic problems
The use of dedicated links guarantees that each connection can carry its own data load, thus eliminating the traffic problems that can occur when links must be shared by multiple devices.
2.Robust
A mesh topology is robust. If one link becomes unusable, it does not incapacitate the entire system.
3.High privacy or security. When every message travels along a dedicated line, only the intended recipient sees it. Physical boundaries prevent other users from gaining access to messages.
4.Easy fault identification and fault isolation
point-to-point links make fault identification and fault isolation easy. Traffic can be routed to avoid links with suspected problems. This facility enables the network manager to discover the precise location of the fault and aids in finding its cause and solution.
Disadvantages:
1.Large amount of cable requirement.
because every device must be connected to every other device.
2. Installation and reconnection are difficult.
To add or remove a system requires lots of connection to be added or removed.
3.More availabiltity of space
the sheer bulk of the wiring can be greater than the available space (in walls, ceilings, or floors) can accommodate.
4.Expensive
The hardware required to connect each link (I/O ports and cable) can be prohibitively expensive.
Mesh toplogy major use
As a backbone connecting the main computers of a hybrid network that can include several other topologies.
Star Topology:
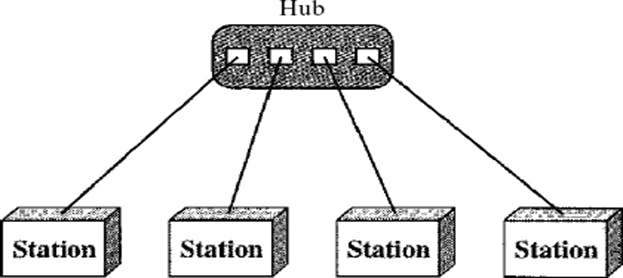
In a star topology, each device has a dedicated point-to-point link only to a central controller, usually called a hub. The devices are not directly linked to one another.
Unlike a mesh topology, a star topology does not allow direct traffic between devices. The controller acts as an exchange: If one device wants to send data to another, it sends the data to the controller, which then relays the data to the other connected device .
Advantages:
1.Star topology is less expensive than a mesh topology
2.Easy to install and reconfigure.
additions, moves, and deletions involve only one connection: between that device and the hub.
3.Robust technology.
If one link fails, only that link is affected. All other links remain active.
4.Easy fault identification and fault isolation
As long as the hub is working, it can be used to monitor link problems and bypass defective links.
Disadvantages:
1.Dependency on hub.
One big disadvantage of a star topology is the dependency of the whole topology on one single point, the hub. If the hub goes down, the whole system is dead.
- Often more cabling is required in a star than in some other topologies (such as ring or bus).
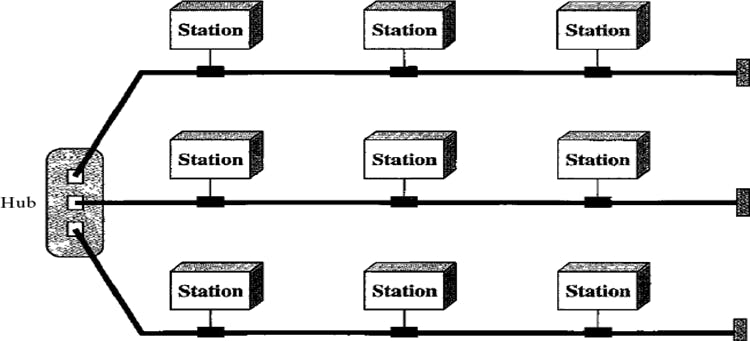
Bus Topology:
A bus topology is multipoint toplogy . One long cable acts as a backbone to link all the devices in a network as shown
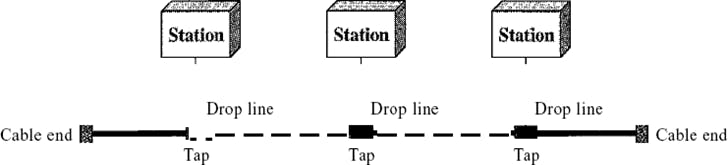
• Nodes are connected to the bus cable by drop lines and taps.
• A drop line is a connection running between the device and the main cable.
• A tap is a connector that either splices into the main cable or punctures the sheathing of a cable to create a contact with the metallic core.
• As a signal travels along the backbone, some of its energy is transformed into heat. Therefore, it becomes weaker and weaker as it travels farther and farther. For this reason there is a limit on the number of taps a bus can support and on the distance between those taps.
Advantages:
1.Ease of installation
2.Bus uses less cabling than mesh or star topologies
Backbone cable can be laid along the most efficient path, then connected to the nodes by drop lines of various lengths
Disadvantages :
1.Difficult reconnection and fault isolation
2.Signal reflection at the taps can cause degradation in quality
3.Not a robust technology
a fault or break in the bus cable stops all transmission
- Creates noise
The damaged area reflects signals back in the direction of origin, creating noise in both directions
Where it is used?
Bus topology was the one of the first topologies used in the design of early local area networks. Ethernet LANs can use a bus topology, but they are less popular.
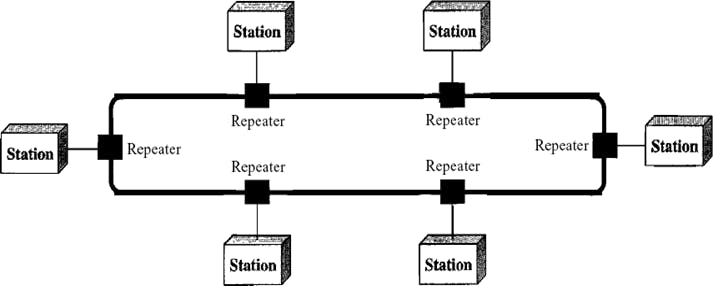
Ring Topology
•In a ring topology, each device has a dedicated point-to-point connection with only the two devices on either side of it.
• A signal is passed along the ring in one direction, from device to device, until it reaches its destination.
• Each device in the ring incorporates a repeater. When a device receives a signal intended for another device, its repeater regenerates the bits and passes them along
Advantages:
1.Relatively easy to install and reconfigure
Each device is linked to only its immediate neighbors (either physically or logically). To add or delete a device requires changing only two connections.
2.Fault isolation is simplified
Generally in a ring, a signal is circulating at all times. If one device does not receive a signal within a specified period, it can issue an alarm. The alarm alerts the network operator to the problem and its location.
Disadvantages:
1.unidirectional traffic can be a disadvantage
- Not a robust technologyu.
A break in the ring (such as a disabled station) can disable the entire network
Hybrid topology & Star-bus topology
we can have a main star topology with each branch connecting several stations in a bus topology as shown in Figure.